7.8.5. 设计说明
7.8.5.1. 源码说明
源代码位于:drivers/pwm/pwm-zx.c
7.8.5.2. 模块架构
Linux提供了一个PWM子系统,使得在用户空间可以通过sysfs节点来控制Backlight背光。 整个软件框架如下图:
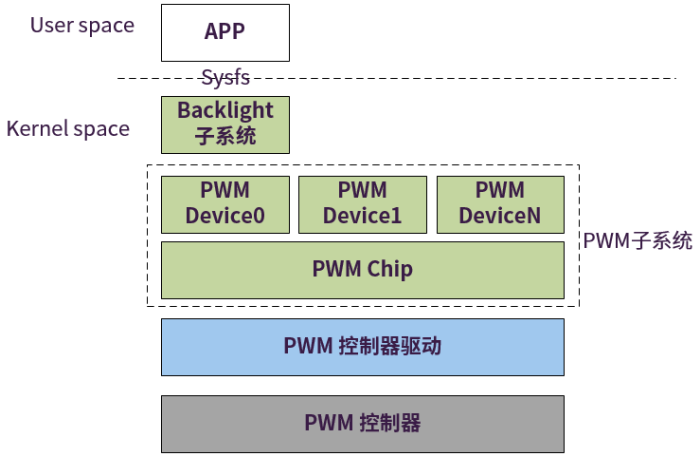
图 7.37 Linux PWM 子系统和 Backlight 子系统的软件关系图
上图可以看到PWM子系统中有两个概念:
- PWM Chip
和硬件的PWM控制器一一对应,内核中维护了一个pwm chip的链表。
- PWM Device
和硬件的多路PWM通道一一对应,一个pwm chip可以包含多个pwm device。
7.8.5.3. 关键流程设计
7.8.5.3.1. 初始化流程
PWM驱动的初始化过程见aic_pwm_probe()函数,除了普通platform设备的处理过程(申请regs资源、clk、reset)外,需要调用PWM子系统的接口pwmchip_add()来注册一个PWM控制器。
int pwmchip_add(struct pwm_chip *chip);
其中参数pwm_chip中关键信息有:通道数目、PWM控制器的ops等,aic_pwm_ops定义如下:
static const struct pwm_ops aic_pwm_ops = {
.free = aic_pwm_free,
.get_state = aic_pwm_get_state,
.config = aic_pwm_config,
.set_polarity = aic_pwm_set_polarity,
.enable = aic_pwm_enable,
.disable = aic_pwm_disable,
.owner = THIS_MODULE,
};
7.8.5.3.2. 背光设备的初始化流程
在 内核配置 中,我们打开了一个背光设备“Generic PWM based Backlight Driver”,这个设备对应的驱动代码见 drivers/video/backlight/pwm_bl.c,在其中的probe()函数中会调用devm_pwm_get()来获取对应的pwm设备。
pwm_bl.c, pwm_backlight_probe()
-> pwm/core.c, devm_pwm_get()
-> aic_pwm_get_state()
-> pwm/core.c, pwm_apply_state()
-> aic_pwm_config()
-> aic_pwm_set_polarity()
7.8.5.3.3. 中断处理流程
备注
PWM的中断处理函数暂时为空,还不确定有哪些异常需要处理。
7.8.5.4. 数据结构设计
7.8.5.4.1. aic_pwm_arg
记录每一个PWM通道的配置信息:
struct aic_pwm_arg {
bool available;
enum aic_pwm_mode mode;
u32 tb_clk_rate;
u32 freq;
u32 db_red; /* Rising edge delay count of Dead-band */
u32 db_fed; /* Failing edge delay count of Dead-band */
struct aic_pwm_action action0;
struct aic_pwm_action action1;
u32 period;
bool def_level;
enum pwm_polarity polarity;
};
7.8.5.4.2. aic_pwm_chip
struct aic_pwm_chip {
struct pwm_chip chip;
struct attribute_group attrs;
struct aic_pwm_arg args[AIC_PWM_CH_NUM];
unsigned long pll_rate;
unsigned long clk_rate;
void __iomem *regs;
struct clk *clk;
struct reset_control *rst;
u32 irq;
};
7.8.5.5. 接口设计
以下接口是 Linux PWM 子系统需要的标准接口。
7.8.5.5.1. aic_pwm_enable
函数原型 |
static int aic_pwm_enable(struct pwm_chip *chip, struct pwm_device *pwm) |
|---|---|
功能说明 |
使能一个pwm通道(device) |
参数定义 |
chip - 指向pwm_chip的指针
pwm - 指向pwm_device的指针
|
返回值 |
0,成功; < 0,失败 |
注意事项 |
7.8.5.5.2. aic_pwm_disable
函数原型 |
static void aic_pwm_disable(struct pwm_chip *chip, struct pwm_device *pwm) |
|---|---|
功能说明 |
关闭一个pwm通道(device) |
参数定义 |
chip - 指向pwm_chip的指针
pwm - 指向pwm_device的指针
|
返回值 |
无 |
注意事项 |
7.8.5.5.3. aic_pwm_free
函数原型 |
static void aic_pwm_free(struct pwm_chip *chip, struct pwm_device *pwm) |
|---|---|
功能说明 |
释放一个pwm通道(device),实际上是设置其period为0(无效) |
参数定义 |
chip - 指向pwm_chip的指针
pwm - 指向pwm_device的指针
|
返回值 |
无 |
注意事项 |
需要先调用aic_pwm_disable(),再调用此接口 |
7.8.5.5.4. aic_pwm_get_state
函数原型 |
static void aic_pwm_get_state(struct pwm_chip *chip, struct pwm_device *pwm,
struct pwm_state *state)
|
|---|---|
功能说明 |
获取当前PWM控制器的配置信息。
当使能boot logo功能时,U-Boot中已经初始化过PWM,
所以Linux中需要从PWM控制器中同步一下当前状态
|
参数定义 |
chip - 指向pwm_chip的指针
pwm - 指向pwm_device的指针
state - 指向pwm_state的指针,用于返回当前PWM的状态信息
|
返回值 |
无 |
注意事项 |
7.8.5.5.5. aic_pwm_config
函数原型 |
static int aic_pwm_config(struct pwm_chip *chip, struct pwm_device *pwm,
int duty_ns, int period_ns)
|
|---|---|
功能说明 |
配置一个pwm通道(device)的占空比 |
参数定义 |
chip - 指向pwm_chip的指针
pwm - 指向pwm_device的指针
duty_ns - 一个PWM周期内的负载时长
period_ns - 一个PWM周期
|
返回值 |
0,成功;< 0,失败 |
注意事项 |
7.8.5.5.6. aic_pwm_set_polarity
函数原型 |
static int aic_pwm_set_polarity(struct pwm_chip *chip, struct pwm_device *pwm,
enum pwm_polarity polarity)
|
|---|---|
功能说明 |
配置一个pwm通道(device)的极性(是否需要翻转) |
参数定义 |
chip - 指向pwm_chip的指针
pwm - 指向pwm_device的指针
polarity - 指定的极性
|
返回值 |
0,成功;< 0,失败 |
注意事项 |