2. 原理图设计
2.1. 引脚功能复用
2.1.1. M3A/M3C 功能复用
引脚 |
功能2 |
功能3 |
功能4 |
功能5 |
功能6 |
功能7 |
功能8 |
|---|---|---|---|---|---|---|---|
PA0 |
GPADC0 |
IR_TX |
I2C0_SCL |
UART0_TX |
CPU_NMI |
||
PA1 |
GPADC1 |
IR_RX |
I2C0_SDA |
UART0_RX |
DE_TE |
||
PA2 |
GPADC2 |
CAN1_TX |
I2C1_SCL |
UART1_TX |
UART2_CTS |
||
PA3 |
GPADC3 |
CAN1_RX |
I2C1_SDA |
UART1_RX |
UART2_RTS |
||
PA4 |
GPADC4 |
CAN0_TX |
UART2_TX |
||||
PA5 |
GPADC5 |
CAN0_RX |
UART2_RX |
||||
PA8 |
RTP_XP |
I2C0_SCL |
|||||
PA9 |
RTP_YP |
I2C0_SDA |
|||||
PA10 |
RTP_XN |
IR_RX |
JTAG_MS |
||||
PA11 |
RTP_YN |
IR_TX |
JTAG_CK |
||||
PB0 |
SPI0_WP |
SPI1_WP |
UART0_TX |
||||
PB1 |
SPI0_MISO |
SPI1_MISO |
UART2_TX |
||||
PB2 |
SPI0_CS0 |
SPI1_CS |
UART2_RX |
||||
PB3 |
SPI0_HOLD |
SPI1_HOLD |
UART0_RX |
||||
PB4 |
SPI0_CLK |
SPI1_CLK |
UART2_RTS |
||||
PB5 |
SPI0_MOSI |
SPI1_MOSI |
UART0_RTS |
UART2_CTS |
|||
PB6 |
SDC0_CMD |
SPI1_CS |
UART1_TX |
||||
PB7 |
SDC0_CLK |
SPI1_MISO |
UART1_RX |
||||
PB8 |
SDC0_D3 |
SPI1_MOSI |
UART1_RTS |
UART3_CTS |
|||
PB9 |
SDC0_D0 |
SPI1_CLK |
UART3_RTS |
||||
PB10 |
SDC0_D1 |
SPI1_HOLD |
UART3_TX |
||||
PB11 |
SDC0_D2 |
SPI1_WP |
UART3_RX |
||||
PC0 |
SDC1_D1 |
I2C0_SCL |
UART3_RTS |
JTAG_MS |
|||
PC1 |
SDC1_D0 |
||||||
PC2 |
SDC1_CLK |
UART0_TX |
|||||
PC3 |
SDC1_CMD |
||||||
PC4 |
SDC1_D3 |
PWM0_A |
I2C1_SCL |
UART3_TX |
UART0_RX |
||
PC5 |
SDC1_D2 |
PWM0_B |
I2C1_SDA |
UART3_RX |
JTAG_CK |
||
PC6 |
SDC1_DET |
PWM1_A |
I2C0_SDA |
UART3_CTS |
DE_TE |
IR_RX |
|
PC7 |
PWM1_B |
IR_TX |
|||||
PD0 |
LCD_D0 |
CAN0_TX |
I2C0_SCL |
UART0_TX |
|||
PD1 |
LCD_D1 |
CAN0_RX |
I2C0_SDA |
UART0_RX |
|||
PD2 |
LCD_D2 |
CAN1_TX |
I2C1_SCL |
UART1_TX |
|||
PD3 |
LCD_D3 |
CAN1_RX |
I2C1_SDA |
UART1_RX |
|||
PD4 |
LCD_D4 |
I2C1_SCL |
UART2_TX |
||||
PD5 |
LCD_D5 |
I2C1_SDA |
UART2_RX |
||||
PD6 |
LCD_D6 |
PWM0_A |
DSPK0 |
||||
PD7 |
LCD_D7 |
PWM0_B |
DSPK1 |
||||
PD8 |
LCD_D8 |
PWM1_A |
|||||
PD9 |
LCD_D9 |
||||||
PD10 |
LCD_D10 |
||||||
PD11 |
LCD_D11 |
||||||
PD12 |
LCD_D12 |
||||||
PD13 |
LCD_D13 |
||||||
PD14 |
LCD_D14 |
||||||
PD15 |
LCD_D15 |
||||||
PD16 |
LCD_D16 |
||||||
PD17 |
LCD_D17 |
||||||
PD18 |
LCD_D18 |
||||||
PD19 |
LCD_D19 |
||||||
PD20 |
LCD_D20 |
||||||
PD21 |
LCD_D21 |
||||||
PD22 |
LCD_D22 |
||||||
PD23 |
LCD_D23 |
||||||
PD24 |
LCD_DCLK |
||||||
PD25 |
LCD_HS |
PWM0_B |
|||||
PD26 |
LCD_VS |
PWM1_A |
|||||
PD27 |
LCD_DE |
PWM1_B |
|||||
PE12 |
PWM1_B |
DSPK1 |
|||||
PE13 |
PWM0_A |
DSPK0 |
2.1.2. M3A/M3C QFN68 封装引脚说明
引脚 |
定义 |
类型 |
功能 |
备注说明 |
|---|---|---|---|---|
SYS |
||||
52 |
RESETN |
INPUT |
系统复位 |
内置约30Kohm上拉电阻和去抖滤波,不使用可
直接悬空,若外挂电容建议不超过4.7uF
|
Power |
||||
12,29,54 |
VCC33_IO |
POWER |
CPU IO电压 |
3.3V供电 |
55 |
LDO25 |
POWER |
内置LDO输出 |
内部模拟模块使用,外部接1uf旁路电容 |
28 |
LDO18 |
POWER |
内置LDO输出 |
供内部PSRAM使用,若使用需做好芯片散热,
外部接1uf旁路电容
|
27,53 |
VDD11_SYS |
POWER |
CPU Core电压 |
1.1V供电,若使用内置LDO1x,必须做好芯片散热 |
69 |
GND |
POWER |
- |
GND 铜皮全连接,需多加过孔散热 |
2.2. 时钟和电源
2.2.1. POWER
电源系统
芯片需提供 VCC33_IO(CPU IO 电源:3.3V/100mA),可使用外置LDO或DCDC。
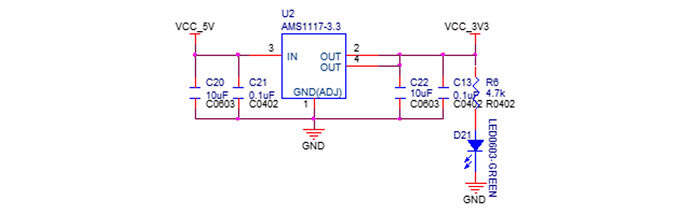
图 2.1 CPU IO 电源 VCC33_IO原理图
内置LDO18,默认开启,可配置输出1.8V供PSRAM使用,外部接1uF旁路电容即可。
内置LDO1x,默认开启,可配置输出1.1V供VDD11_SYS使用。
内置LDO25,默认开启,供内部模拟模块使用,外部接1uf旁路电容即可。
注意
若使用内置LDO1x,因转换效率问题,功耗会较外置DCDC增加100mW左右。
若使用内置LDO18和LDO1x,芯片表面温度最高43°C左右。
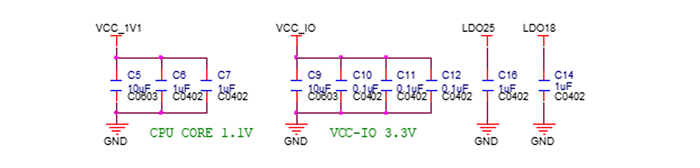
图 2.2 Power 电路去耦电容
上下电时序要求
无上下电时序要求。
内置24M PLL,无需外挂晶振。
复位信号内置约30Kohm上拉电阻和去抖滤波,不使用可直接悬空,若外挂电容建议不超过4.7uF。上电完成后,复位自动释放。
2.2.2. SYS
系统功能脚说明
信号名 |
信号说明 |
应用说明 |
|---|---|---|
UBOOT |
升级模式配置 |
可在UBOOT或bootloader配置任意IO为下拉检测或上拉检测
进入升级模式,默认使用PA0下降沿检测,建议预留按键或跳线
|
RESET |
CPU复位脚 |
内部RC上拉,低电平复位,可悬空,建议预留按键或跳线 |
2.3. 存储
2.3.1. PSRAM
芯片内部默认 Sip 64Mb PSRAM,最高频率 200MHz DDR。
LDO18为芯片内部 1.8V LDO输出,可配置电压为PSRAM供电。
PSRAM 功耗不超过1.8V/50mA。
2.3.2. FLASH
SPI0/1 为QSPI控制器,最大支持四线数据传输,用于Flash类型设备的快速读写访问。
默认使用 SPI0 为Flash类型设备启动接口。
QSPI 支持 NAND Flash / NOR Flash,支持单/双/四线模式。
IO最大速率 SDR 100MHz,仅支持3.3V IO电压,Flash容量不限制。
注意
SPI_CS、SPI_WP、SPI_HOLD必需保留上拉电阻。
QSPI 信号必需做等长约束,约束不大于20mil,否则跑四线模式容易出现速度跑不高的情况。
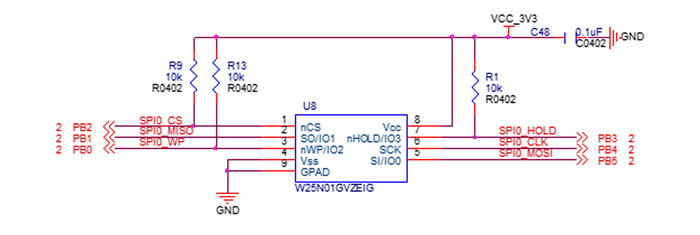
图 2.3 SPI0 NAND Flash电路原理图
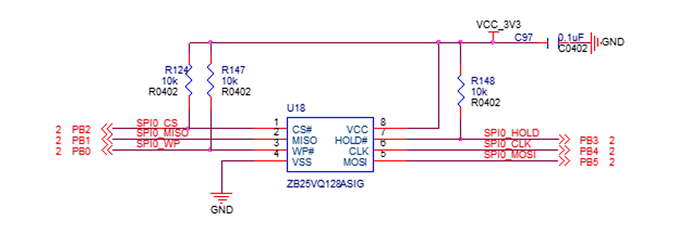
图 2.4 SPI0 NOR Flash电路原理图
2.3.3. eMMC
使用SDC0接口,支持单线/四线模式,支持eMMC 4.41协议,支持SDR25/SDR50/DDR50模式。
IO最大速率 DDR 50MHz,仅支持3.3V IO电压。
D0、CMD和RST信号建议上拉到VCC33_IO。
注意
SDC0_D0~SDC0_D3、SDC0_CLK、SDC0_CMD信号走线做等长约束,约束不大于50mil。
CLK信号不需上拉,最好在靠近主控端串联22欧电阻,若并联容值不超过22pF。
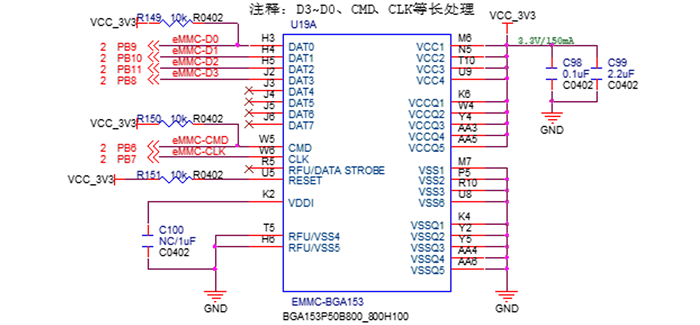
图 2.5 SDC0 eMMC电路原理图
2.3.4. CARD
使用SDC1接口,支持单线/四线模式。
IO最大速率 DDR 50MHz,仅支持3.3V IO电压。
CLK信号不需上拉,最好在靠近主控端串联22欧电阻,若并联容值不超过22pF。
D0、CMD和DET信号建议上拉到VCC33_IO。
SD接口信号线TVS管结电容 < 22pF,否则影响信号传输质量。
建议保留DET信号线上的1k串联电阻,避免在插入SD CARD时产生信号下冲,同时提高GPIO ESD性能。
注意
SDC1_D0~SDC1_D3、SDC1_CLK、SDC1_CMD信号走线做等长约束,约束不大于50mil。
CLK信号不需上拉,最好在靠近主控端串联22欧电阻,若并联容值不超过22pF。
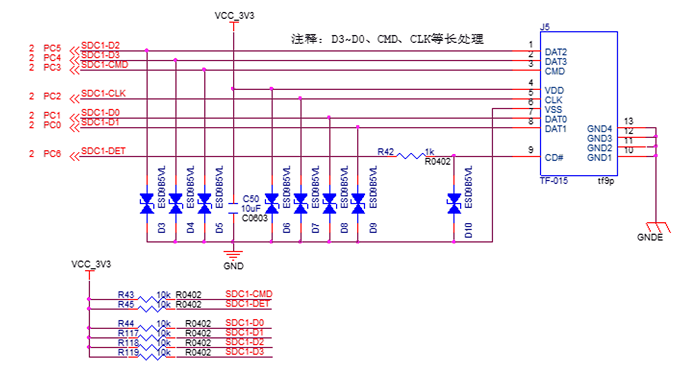
图 2.6 SDC1 CARD电路原理图
2.4. 多媒体
2.4.1. PRGB屏接口
PRGB模式兼容5种MAPPING输出配置,默认为24bits,可配置为18bits、16bits,相应的低位不使用。
配置0:RGB888建议使用,支持R/G/B 整组信号互换。
配置1:RGB666建议使用,支持R/G/B 整组信号互换。
配置2:RGB666,支持R/G/B 整组信号互换。
配置3:RGB565建议使用,支持R/G/B 整组信号互换。
配置4:RGB565,支持R/G/B 整组信号互换。
注意
支持组内信号高位到低位排序互换,需软件配置data-mirror。
默认配置为RGB,为方便Layout,可将R和B整组互换,需软件配置将data-order修改为BGR。
RGB888接口高位可用于RGB666或565,CPU端相应的低位不接或可用于其他功能。
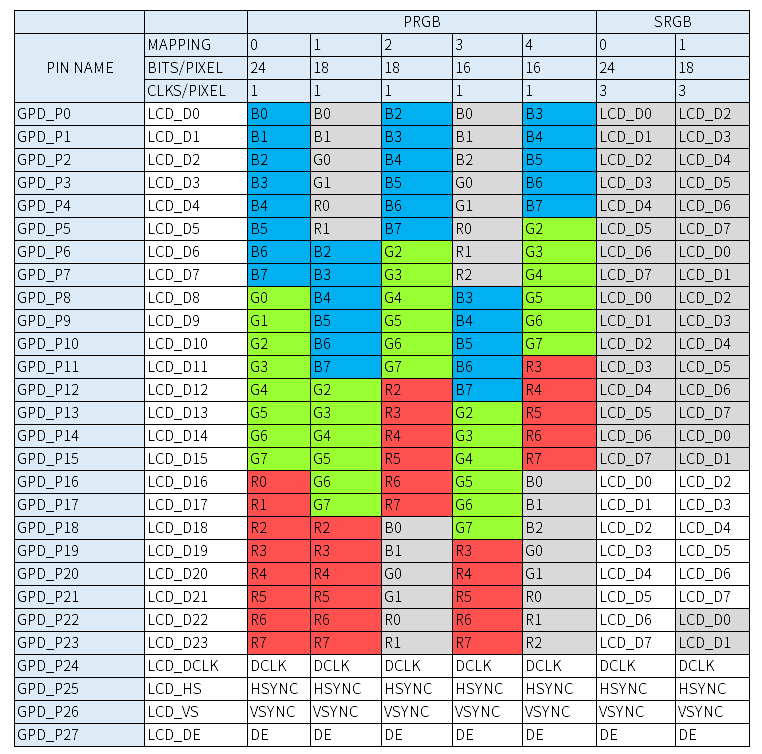
图 2.7 RGB 不同配置定义

图 2.8 RGB565 / RGB666 电路原理图
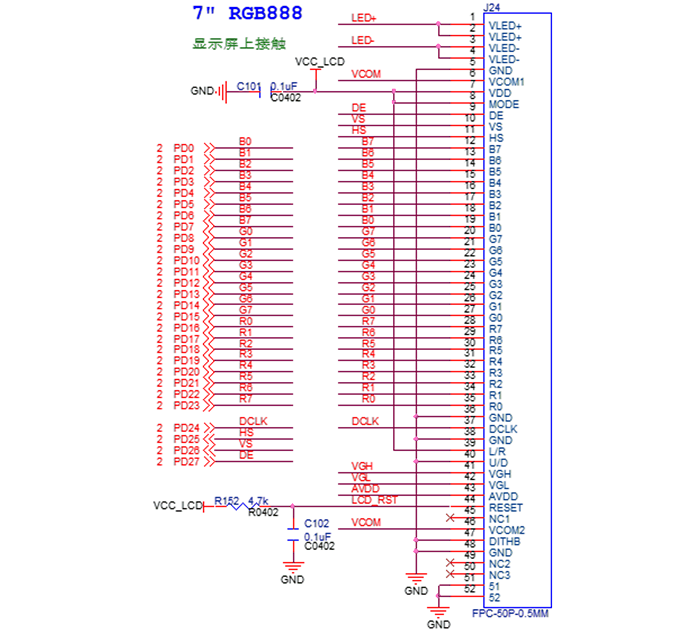
图 2.9 RGB888 电路原理图
2.4.2. MCU屏接口
MCU屏接口包含常见的I8080、SPI、QSPI。

图 2.10 I8080 不同配置定义
注意
注意SPI屏通信接口交叉,PD21/SDO为输出,需接屏端SDI输入;PD20/SDI为输入,需接屏端SDO输出。
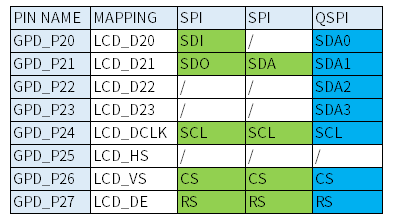
图 2.11 SPI/QSPI屏连接定义
2.4.3. TP
集成 RTP 电阻触摸屏接口,可支持RTP电阻屏触摸。
RTP 仅支持4线,即X+/X-/Y+/Y-。
RTP 支持最多2点触摸。
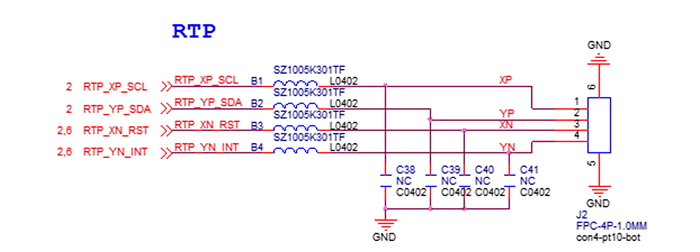
图 2.12 RTP 电阻屏触摸电路原理图
使用I2C和GPIO,可支持CTP电容屏触摸。
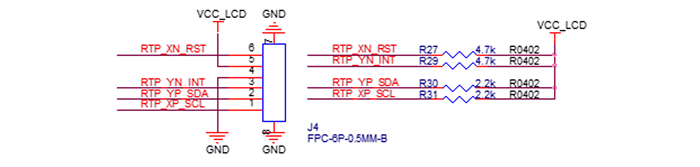
图 2.13 CTP 电容屏触摸电路原理图
2.4.4. PWM
支持PWM0~PWM2共两组PWM波形发生器
PWMx_A和PWMx_B同属一组PWM,可配置成单独输出或同时输出,但频率相同,占空比可不相同。
PWM通常用于背光控制,频率一般为20kHz~1MHz。
PWM通常用于蜂鸣器,频率一般为3kHz~4kHz。
注意
PWMx_A和PWMx_B可分开独立控制,但频率是相同的,占空比可独立调。
不同频率的应用不能使用同一组PWM,比如蜂鸣器和背光,需分开使用不同通道。
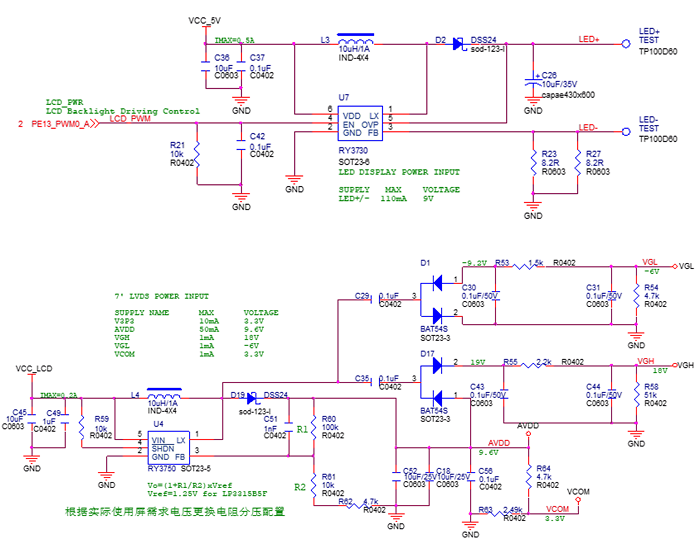
图 2.14 LCD 背光和偏压电路原理图
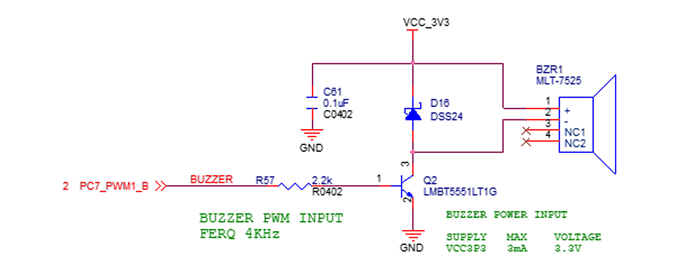
图 2.15 蜂鸣器电路原理图
2.4.5. AUDIO
Speaker
支持2路单端输出(双喇叭,左右声道输出)。
支持1路差分输出(单喇叭,单声道输出)。
支持DSPK0和DSPK1内部混音后,再通过任意单一通路输出。
注意
DSPK是数字信号,从CPU出来必需接RC(R=100R,C=470nF)转换成模拟信号才能给到音频功放。
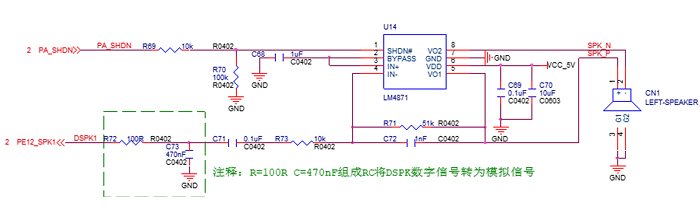
图 2.16 Speaker 单端输出电路原理图
2.5. 通用接口
2.5.1. SPI
SPI0/1 为标准SPI控制器,用于存储设备或其他SPI接口设备的访问。
支持Master和Slave。
支持QSPI 单/双/四线模式。
SPI_CS、SPI_WP、SPI_HOLD必需保留上拉电阻。
2.5.2. UART
UART兼容工业16550标准,支持常用波特率,最大波特率支持5Mbps。
支持UART 两线(TX、RX),通常应用于TTL、RS485、RS232、DEBUG打印。
支持UART 三线(TX、RX、RTS),通常应用于RS485、某些模块比如RTL8723DS其蓝牙只需UART三线。
支持UART 四线自动流控(TX、RX、RTS、CTS),通常应用于RS232、蓝牙通信。
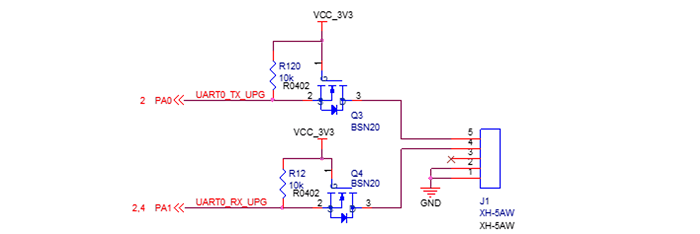
图 2.17 串口烧录电路原理图
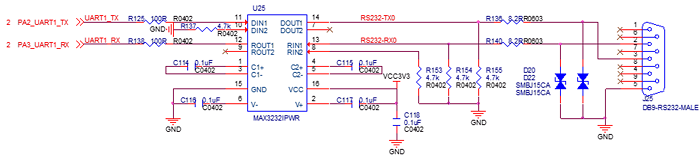
图 2.18 RS232串口电路原理图
RS485支持硬件自动控制收发方向,也支持软件控制收发方向
在IO资源紧张时,建议采用两线接法,通过UART_TX引脚进行半双工收发,UART_RX引脚进行自动方向控制。
需要做光耦隔离时,可采用常规三线接法,UART_RTS引脚进行自动方向控制。
注意
使用两线接法时,TX引脚既当发送又当接收;RX引脚用于自动控制收发方向。
使用三线接法时,建议使用UART_RTS接485-DIR,方便使用硬件自动控制收发功能。
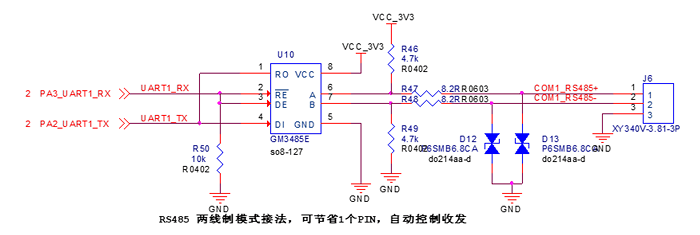
图 2.19 RS485 两线接法电路原理图
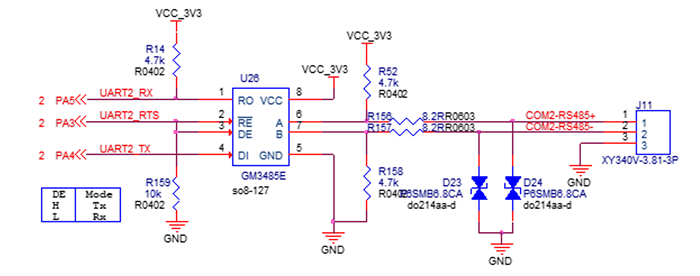
图 2.20 RS485 三线接法电路原理图
2.5.3. I2C
I2C速率最大支持400kbps,支持master 和 slave 模式。
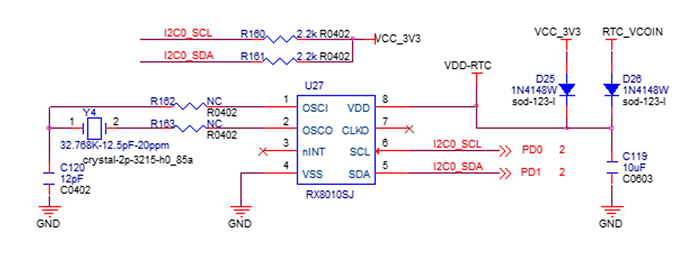
图 2.21 I2C 外接RTC电路原理图
2.5.4. CAN
支持CAN0和CAN1两套控制器
支持CAN2.0A和CAN2.0B协议,可编程通信速率最高1Mbps。
外围电路需接收发器,才能组成CAN总线网络。
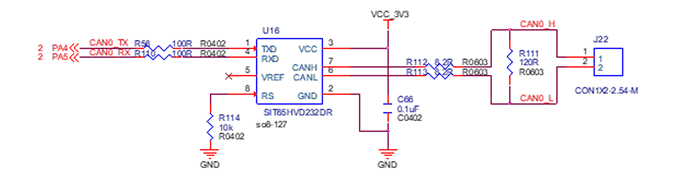
图 2.22 CAN 电路原理图
2.5.5. CIR
支持市面常见红外协议,如NEC、RC5、RC6、RC-MM、Sony、Sanyo、JVC等。
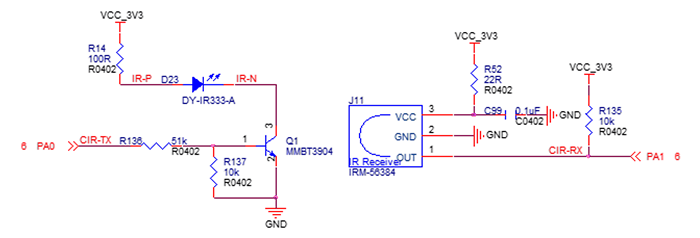
图 2.23 CIR 红外收发电路原理图
2.5.6. SDIO
SDC0/SDC1 可用于用于访问SDIO接口的设备,比如eMMC、CARD、WiFi模组。
SDIO 接口只支持 3.3V IO 电平,接口顺序关系需注意。
SDIO 接口按等长约束走线,CLOCK 尽量包地处理。
天线端增加 TVS 管,防止 ESD 静电打坏模块。
所有电源滤波电容尽量靠近芯片电源输入脚放置。
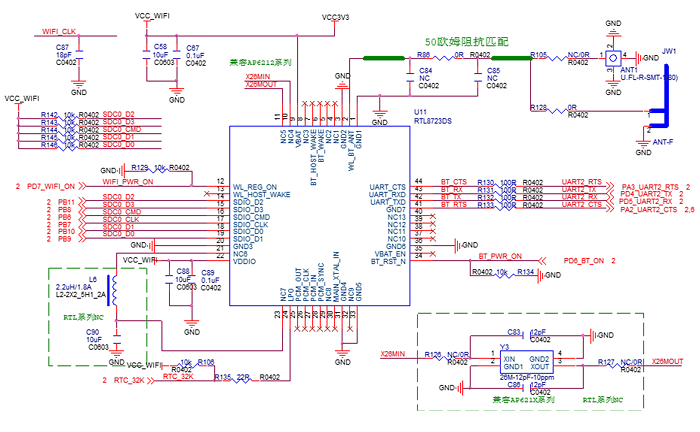
图 2.24 SDC0 WiFi+BT 电路原理图
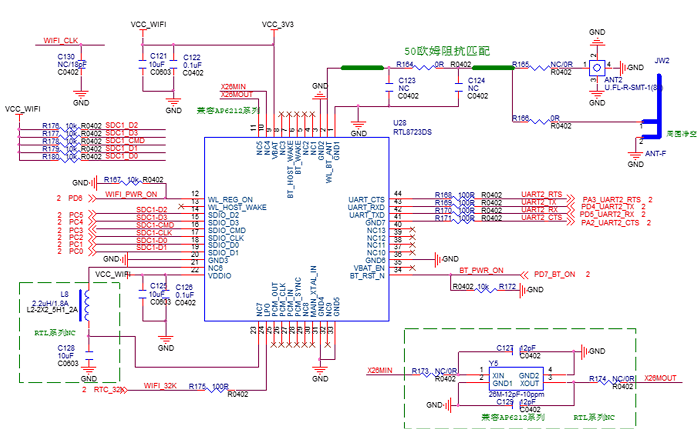
图 2.25 SDC1 WiFi+BT 电路原理图